Unipolarmaschine
Die Unipolarmaschine wird als Gleichstromquelle für die sehr hohe Ströme und tiefe Spannungen und mit supraleitenden Spulen als Motor (Beispiel: Militäranwendungen) entwickelt. Eine Konstruktion ohne Schleifkontakte ist nicht möglich.
Mit einer Batterie, einer Schraube, einem Permanentmagneten und einem Draht kann man einen einfachen Unipolarmotor ohne Werkzeug bauen. Das Streufeld des Magneten durchfliesst axial den Schraubenkkopf, durch den der Strom aus der Batterie radial fliesst. Dadurch entsteht ein kleines Drehmoment, welche die mit sehr wenig Reibung an der Batterie magnetisch haftende Schraube auf hohe Drehzahlen beschleunigt. Kehrt man die Polarität der Batterie, dreht sich die Schraube in die andere Richtung. Die Drehzahl nimmt mit der Spannung zu.

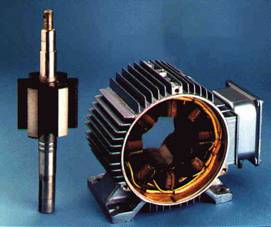
Eisenloser Anker
Die Gleichstrommaschine mit Glockenanker hat eine geringe Rotorträgheit und nur sehr geringe Eisenverluste.

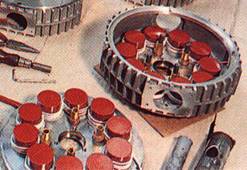
Scheibenläufer
Der Scheibenläufermotor war vor der Zeit der Selten Erde Magnete die Motorenkonstruktion, die sich gut für den Einsatz der AlNiCo-Magnete eignete, weil diese für eine Optimierung der magentischen Energie lang sein müssen (Stichwort Stabmagnete). Nebst den sehr guten dynamischen Eigenschaften ist die Bauform kurz in der Länge. In heute erhältlichen Scheibenläuferantrieben werden Selten Erde Magnete eingesetzt auf dem Konstruktionsprinzip der permanent erregten Gleichstrommaschine und Synchronmaschine.

Integralmotor
Der Integralmotor ist in den 90'er Jahren aufgekommen. Unter Integralmotor versteht man den Zusammenbau von Motor und Regelgerät. Da ein Motor höhere Temperaturen als Regelgeräte aushaltet, muss bei der Konstruktion auf den Wärmefluss besonders geachtet werden. Integralmotoren gibt es heute für fast alle Motorenarten, sie sind sehr praktisch:
- Möglichkeit der optimalen Abstimmung von Motor und Regelgerät
- Einfacher Einbau, nur Netzanschluss und Bus, keine Verdrahtung von Gebersignal und Temperaturüberwachung.
- Einsparung von Platz im Schaltschrank
- Wenn der Antrieb nicht läuft, dann muss nicht untersucht werden, ob Motor oder Regler defekt ist.
Der einzige Negativpunkt ist der Preis, welcher meistens über dem der Einzelkomponenten liegt.


Reluktanzmotor
Der Reluktanzmotor ist ein Asynchronmotor mit einem inhomgenen Rotor. Durch den unterschiedlichen magentischen Widerstand im Rotor wird der Asynchronmotor in der Nähe der synchronen Drehzahl zur Synchronmaschine, das heisst, er hat keinen Schlupf mehr und dreht synchron mit der Speisefrequenz.
Relktanzmotoren haben einen schlechten Wirkungsgrad und Leistungsfaktor und sind für die Nennleistung grösser und somit teurer als Normmotoren. Die Drehzahlgenauigkeit beim Betrieb mit Frequenzumrichter kann auch mit einer geregelten Asynchronmaschine (Tacho und Rückführung) erreicht werden.
Asynchronmotor mit Permanentmagneten
Eine weitere Ausführungsvariante des Relunktanzmotors oder der Synchronmaschine.
Spaltpolmotor
Nebst dem Kondensatormotor ist der Spaltpolmotor eine Asynchronmaschine welche am Einphasennetz betrieben werden kann. Damit der Motor beim Start eine Drehrichtungsvorgabe erhält, wird bei der 2-poligen Ausführung über 2 Spaltpole und ihre beiden Kurzuschlussringe das Magenetfeld verzögert in den Rotor geleitet. Der Rotor dreht sich dann vom Hauptpol zum Spaltpol und läuft hoch.
Spaltpolmotoren werden oft in Anwendungen mit hohen Laufzeiten oder rauer Umgebung eingesetzt (Aquariumpumpen, Ventilatoren, Förderbandantrieb, Laugenpumpen, Aktoren in Getränkeautomaten ...). Sie sind sehr robust und günstig, haben aber einen noch schlechteren Wirkungsgrad als kleine Drehstromasynchronmotoren.
Bürstenloser Gleichstrommotor
Der bürstenlose Gleichstrommotor ist eine Synchronmaschine mit Regelgerät für eine elektronische Kommutierung. Im englischen Sprachraum spricht man auch von "brushless DC-Drive" (BLDC). In der unten dargestellten einfachen Ausführung eines Integralmotors werden an die Wicklungen rechteckige Spannungsblöcke angelegt, welche durch direkt im Motor angeordneten Hallelementen gesteuert werden. Wenn es die Last (zum Beispiel ein PC-Lüfter) erlaubt, dann nimmt die Drehzahl mit höherer Speisespannung zu.
Wenn das Regelgerät drehwinkelabhängig getaktete Spannungsblöcke mit einem sinusförmigen Effektivwert anlegt (Prinzip Frequenzumrichter) werden sehr gute Regeleigenschaften erreicht.
Schleifringloser Synchrongenerator
Um die Abnützung der Kohleschleifkontake und die damit verbunden Kohlestaubemissionen zu vermeiden, gibt es auch Synchrongeneratoren, bei denen die Erregerleistung durch eine weitere Maschiengruppe auf der gleichen Achse kontaktos in den Rotor übertragen wird. Dazu muss dann im Rotor eine Gleichrichtung mit 6 Dioden erfolgen. Der Synchrongenerator wird durch diese Konstruktion etwas länger und die Regelung des Erregerstromes durch die zusätzlichen Energiespeicher (Induktivitäten) aufwendiger. Die Erregung kann auch für eine Schnellentregung auch nicht mehr umgekehrt werden.
Stromrichtermotor
Der Stromrichermotor ist eine schleifringlose Asynchronmaschine mit den Eigenschaften einer Schleifringasynchromaschine. Zwei Asynchronmaschinen sind hintereinander eingebaut. Die Rotorwicklung der ersten Maschine ist mit 2 vertauschten Phasen mit der Rotorwicklung des zweiten Maschine fest verdrahtet. Von Aussen hat dann die erste Statorwicklung die Eigenschaften wie eine normale Statorwicklung, die zweite Statorwicklung hat dann die Eigenschaften einer Rotorwicklungn einer Schleifringasynchromaschine.
Dieser Antrieb wurde vor allem als Belastungsmaschine in Prüfständen von Verbrennungsmotoren und Gasturbinen eingesetzt, da durch die robuste Konstruktion viel höhere Drehzahlen als bei Gleichstrommaschinen erreicht werden konnten und mit Stromrichtertechnik (Phasenanschnitt) die Maschine sehr gut geregelt werden konnte.

Schrittmotor
Schrittmotoren zeichen sich dadurch aus, dass sich der Rotor schrittweise in das von den Statorwicklungen angelegte magnetische Feld ausrichtet. Es gibt Schrittmotoren ohne Permanentmagente im Rotor, welche nur nach dem Reluktanzprinzip (Maxwellkraft) wirken. Die meisten Schrittmotoren haben aber Permanentmagnete im Rotor, was vom Wirkprinzip dann einen Mix auch dem Prinzip der Synchronmaschine und der Reluktanzmaschine ergibt, was in der Fachsprache auch Hybridmotor genannt wird.
Wenn die Last nicht zu gross ist, dann kann das Steuergerät die Schaltfrequenz von einer Wicklung zur nächsten kontinuierlich erhöhen, bis die Enddrehzahl erreicht ist und vor dem Ende der gewünschten Schrittzahl (Endposition) die Schaltfrequenz wieder auf Null reduziert. Wenn die Last oder Beschleunigung zu gross ist, dann verliert der Schrittmotor Schritte und die Endposition entspricht nicht dem Sollwert. Es gibt auch Schrittmotoren mit Lagegeber, aber die sind dann deutlich teurer als die nur gestellten Antriebe.
Kleine Schrittmotoren werden in sehr grossen Stückzahlen im Apparatebau eingesetzt (Drucker, Billetautomaten ...). Durch die hohe Stückzahl der Motoren und der Steuergeräte sind sie sehr günstig. Durch die schrittweise Bewegung (im Standard 100 Schritte pro Umdrehung) sind die Antriebe in der Regel recht laut.
Switched Reluctance Drive
Das Prinzip der geschaltenen Reluktanzmaschine (switched reluctance drive) basiert auf der Maxwellkraft. Im Gegensatz zum Schrittmotor ist der Antrieb immer geregelt, die Ansteuerung der Wicklungen wird über die gemessene Rotorlage oder über ein Rechnenmodell aus dem gemessenen Strom, geregelt.
Geschaltene Reluktanzmotoren gibt es mit einer Phase (Startposition über ein Magnet) und mehreren Phasen. Die Anwendungen reichen vom Kompressorantrieb, über Torantriebe und Zentrifugen bis zu hochdynamischen Servoantrieben. Das Besondere an der geschaltenen Reluktanzmaschine ist die gemeinsame Entwicklung von Motor und Regelgerät und das Fehlen von Sandards, das heisst, der Antrieb kann frei auf eine Anwendung optimiert werden.
Magnetmotor
Der Magnetmotor ist eine Art Synchronmaschine. Wie der Name schon sagt, wird die Erregung mit Permanentmagneten ausgeführt. Bei einer Ausführung als Aussenläufer kommt der Luftspalt weit aussen zu liegen und dadurch kann hat der Antrieb ein sehr hohes Drehmoment im Verhältnis zu seinen Abmessungen.
Transversalflussmaschine
Die Transversalflussmaschine ist der Oberbegriff für eine spezielle topologische Anordnung mit zur Drehachse konzentrischen Wicklungen und einem radialen sowie axialen Verlauf des magnetischen Flusses. Wie bei einem Klauenpolmotor wird der magnetische Kreis um die Wicklung gelegt, im Gegensatz zu einem üblichen Motor, wo die Wicklungen in den magnetischen Kreis eingelegt werden. Der Transversalflussmotor hat somit geringe Kupferwärmeverluste. Er wird hochpolig augeführt, denn sein Drehmoment steigt mit der Polzahl, wobei auch die Streuung zunimmt. Durch die besondere Führung des magnetischen Flusses ist der scheibenförmige Aufbau mit Eisenblechen wegen den Wirbelstromverlusten ungünstig. Da noch keine geschickte Konstruktion gefunden wurde, gibt es bis heute keine günstigen Transversalflussmaschinen auf dem Markt. Der Transversalflussmotor kann auf dem Prinzip der Synchronmaschine mit elektrischer oder permanentmagnetischen Erregung, als Asynchronmaschine mit herausgeführen oder kurzgeschlossenen Wicklungen oder als Reluktanzmaschine ausgeführt werden.
Linearantrieb
Die üblichen rotierenden elektrischen Maschinen können auch als Linearantriebe ausgeführt werden. Viele auf dem Markt erhältliche Linearantriebe bestehen aber aus rotierende Motoren mit einer Spindel.
Reine Linearantriebe sind neben grossen Systemen wie für Magnetschwebebahnen in Werkzeugmaschinen zu finden. Die am meisten verwendete Ausführungsform basiert auf dem Prinzip der Synchronmaschine, bei welcher die Erregung fest ist und die Ankerwicklung über flexible Stromzuführungen der bewegliche Teil ist. Diese System zeichnen sich durch eine sehr hohen Dynamik und Positioniergenauigkeit aus, auf der anderen Seite ist die Kraft bescheiden und der Preis deutlich höher als bei einer Ausführung mit rotierenden Servoantrieben.
Eine weitere Variante sind die unten dargestellten Linearantriebe, welche wie kleine Druckluftzylinder aussehen. Es handelt sich aber um vollwertige Servoantriebe, bei denen die Postion, die Geschwindigkeit und die Kraft kontrolliert werden kann. Der bewegliche Teil besteht aus einer Säule von Permanentmagneten, welche mit abwechselnder Polarisierung in einem unmagnetischen Rohr eingebaut sind. Im Umgebenden Stator sind die Wicklungen, welche zu dieser zweiphasigen Synchronmaschine gehören.

Aktoren
Unter dem Oberbegriff Aktoren sind Einrichtungen gemeint, welche eine Bewegung verursachen. Es gibt eine Vielzahl von Ausführungen welche für bestimmte Aufgabenstellungen speziell entwickelt wurden. Zum Beispiel in Millionenstückzahlen der Tastkopf für eine Harddisk, welche eine direkte Umsetzen der Lorentzkraft ist.

Eine einfache Ausführung eines Linearmotors kann auch mit einer Lautsprecherspule "voice coil" realisiert werden. Damit können über einen Hub von einigen Millimetern sehr hohe Beschleunigungswerte erzielt werden.
Für Spezialaufgaben, wie die Kamerapositionierung in Satelliten gibt es Aktoren mit einer Genauigkeit im Bereich von Winkelsekunden.

Piezomotoren
Piezomotoren funktionen auf dem Piezoprinzip. Übt man eine Kraft auf ein Piezokristall aus, dann verkürzt es sich und es entsteht eine Spannung (Feueranzünder). Legt man an ein Piezokristall eine Spannung an, dass wird es länger und dünner.
Aus diesem Prinzip werden Aktoren gebaut werden. Da die Längenänderungen sehr gering (Nano- bis Mikrometer) sind, werden Piezomotoren welche vor allem in optischen Geräten eingesetzt werden. Durch eine Kaskadierung und über Reibkontakte können aber auch Linearmotoren und sogar rotative Motoren gebaut werden.