

Ein Elektromotor ist ein elektromagnetischer Energiewandler. Der eine Teil des Motors ist fest (Stator), der andere Teil beweglich (Rotor). Bei den meisten Motoren ist der Rotor innen, und überträgt mit einer Welle sein Drehmoment an die Last.
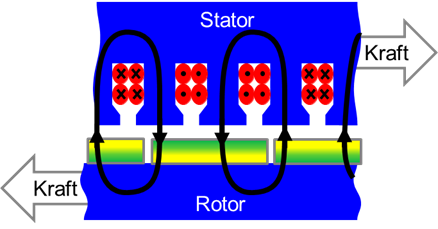
Das Drehmoment wird im Luftspalt (zwischen Stator und Rotor) erzeugt. Bei fast allen elekrischen Maschinen (Ausnahme Reluktanzmotoren) entsteht es vor allem durch die Kraft, welche auf die Stromleiter im Magnetfeld ausgeübt wird (Lorentzkraft). Das Magnetfeld wird entweder durch Elektromagnete (Erregerwicklung) oder mit Permanentmagneten gebildet. Lokal gesehen wirkt eine Schubkraft, deren Grösse proportional zum Magnetfeld und zum Strombelag ist. Die maximale Stärke des Magnetfeldes ist durch die Sättigung des Eisens im Bereich von 1.8 Tesla begrenzt. Die Wärme, welche im Stromleiter entsteht, muss abgeführt werden. Somit ist die maximale Schubkraft begrenzt (bei Normmotoren selten über 30 kN/m²). Das Drehmoment an der Motorwelle ergibt sich aus dem Produkt Schubkraftdichte mal Luftspaltfläche mal Hebelarm, es ist somit proportional zum Rotorvolumen.
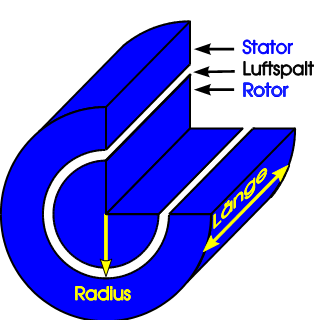
Mit der Induktion \(B\) [Vs/m²], dem Ankerstrombelag \(A\) [A/m], dem Rotorradius \(r\) [m] und der Rotorlänge \(l\) [m] rechnet sich das Drehmoment [Nm] \[M\sim BAr^2l\] Das Drehmoment ist proportional zum Rotorvolumen (bei einem Aussenläufermotor zum Statorvolumen).
Das elektrische Maschinen vor allem aus Eisen und Kupfer bestehen, kann man als Vergleichsgrösse auch das Drehmoment pro Motorgewicht nehmen. Normmotoren haben etwa 1 Nm/kg. Bei einer Drehzahl von 1000 U/min ergibt das eine Leistung von 100 W/kg, bei 30'000 U/min sind es 3000 W/kg.
Beispiel Asynchronmaschine
Diese Theorie lässt sich am einfachsten an den normierten Asynchronmotoren überprüfen. Vergleicht man die Leistung von 2 und 4-poligen Motoren, so sieht man, dass ein 4-poliger Motor oft die gleiche Leistung hat, wie ein gleich grosser 2-poliger Motor. Dieser braucht dafür aber die doppelte Drehzahl. Der 4-polige Motor hat einen grösseren Rotor (erkennbar am grösseren Trägheitsmoment) und dadurch ein etwa doppelt so grosses Drehmoment.
 |
 |
Der 4-polige Motor (rechts) hat ein grösseres Drehmoment als der 2-polige, weil er für den magnetischen Fluss weniger Statoreisen braucht und so mehr Platz für einen grösseren Rotor hat, was ein grösseres Luftspaltvolumen ergibt.