
Die Synchronmaschine wurde früher fast ausschliesslich als Generator in Elektrizitätswerken von 10 kW bis 1,7 GW eingesetzt. Als Motor findet sie durch den Einsatz von Permanentmagneten für die Erregung und Leistungselektronik für die Ansteuerung (elektronische Kommutierung) eine grosse Verbreitung als Servoantrieb (von 1 W bis etwa 20 kW Nennleistung).
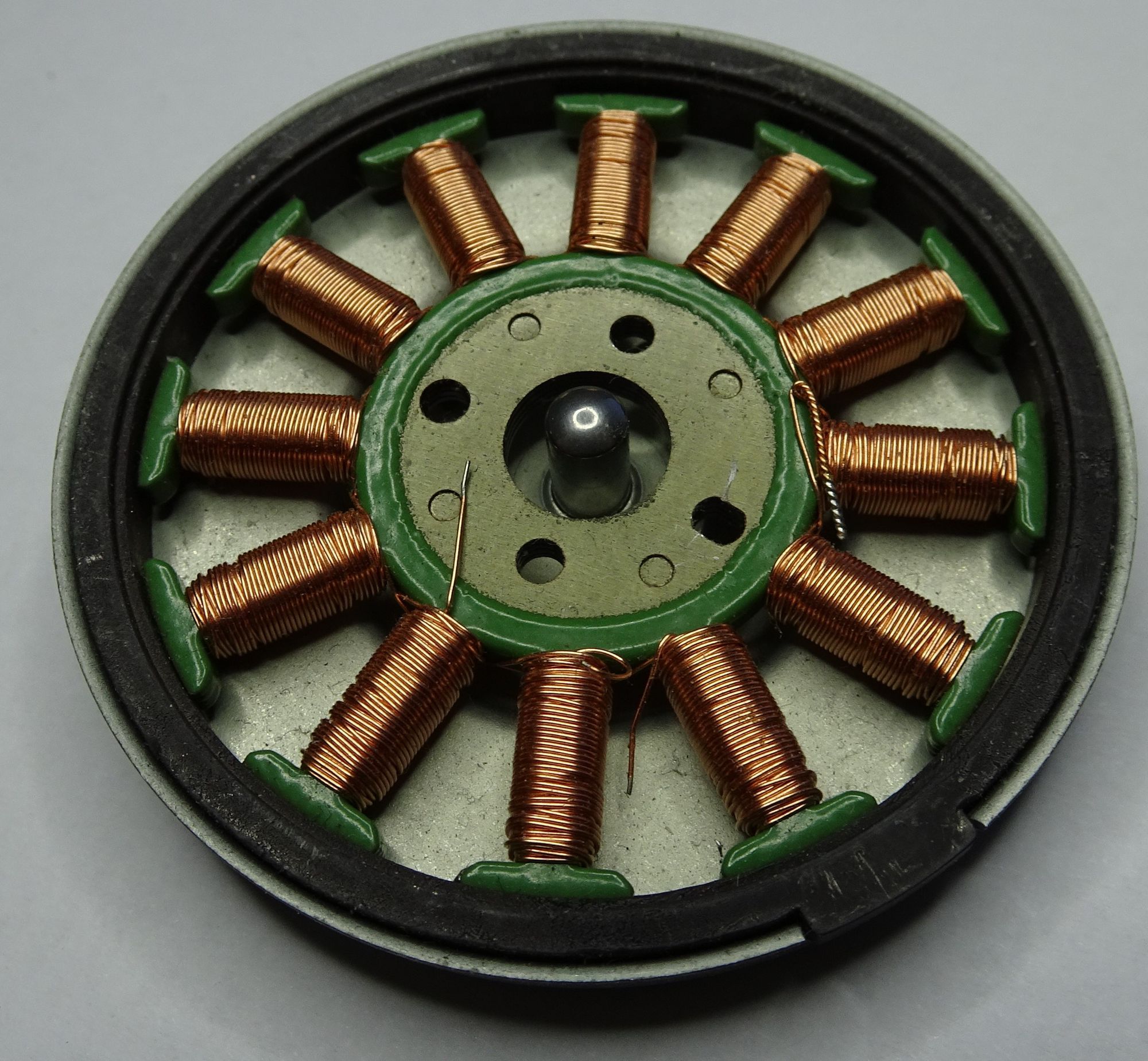
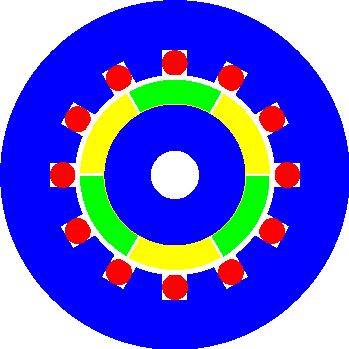
Bei der Synchronmaschine befindet sich die Erregung im Rotor. Der Rotor dreht synchron mit dem umlaufenden Magnetfeld des Statorstromes. Der Stator ist der selbe wie bei einer Asynchronmaschine. Die übliche Synchronmaschine ist eine Drehstrommaschine.

Die Drehmoment-Drehzahlkennline einer Synchronmaschine ist eine senkrechte Strecke. Mit der Netzfrequenz ω [rad/s], der Polpaarzahl p [-] ergibt sich folgende Beziehung für die Drehzahl: Ω = ω / p [rad/s]. Das Nennmoment Mn hängt von der thermischen Möglichkeiten der Maschine ab. Bei einer Belastung über dem Kippmoment Mk hat die Maschine kein Drehmoment mehr, kippt sie weg. Die Synchronmaschine kann ohne Hilfe (Dämpferwicklungen ...) am Drehstromnetz nicht selber anlaufen. Wenn der Rotor nicht mit der Statorfrequenz drehen kann (hohe Beschleunigung oder zu hohes Lastmoment), fliessen in den Statorwindungen sehr hohe Ströme. Der Synchronmotor kann daher nur bei einfachen Anwendungen zusammen mit einem Frequenzumrichter betrieben werden.
In Anlehnung an die Kommutatormaschine lauten die Grundgleichungen für die Synchronmaschine (oft auch bürstenlose Gleichstrommaschine genannt):
| Formel | Einheit | Bezeichnung | Bemerkungen |
|---|---|---|---|
| M ~ I Ψ | Nm | Drehmoment | |
| U ~ Z I + Ω Ψ | V | Spannung | |
| Ω = ω / p | rad/s | Drehzahl | |
| Symbol | Einheit | Bezeichnung | Bemerkungen |
| I | A | Strom | |
| Ψ | Vs | Flussverkettung | |
| Z | Ω | Statorimpedanz | R + jωL |
| ω | rad/s | Netzdrehfrequenz | ω = 2 π f (bei 50 Hz = 314 rad/s) |
| f | Hz | Netzfrequenz | |
| p | - | Polpaarzahl | eine 2-polige Maschine hat die Polpaarzahl 1 |
Bei Servoantrieben wird durch einen Rotorlagegeber im Motor (zum Beispiel ein Resolver) der Elektronik mitgeteilt, welche Windungsspule gerade im Magnetfeld ist und eingeschaltet werden soll. Die Kommutierung erfolgt elektronisch (Transistoren als Schalter). Je nach Kühlung, zulässiger Übertemperatur (dT) und nach der maximalen Stromstärke des Ansteuergerätes ergibt sich für ein Servoantriebssystem untenstehende Kennlinienfeld:
Je höher die Drehzahl ist, desto grösser werden die Eisenverluste. Das Motorgehäuse kann unabhängig von der Drehzahl nur eine bestimmte Verlustwärme abführen, da die Kühlung bei Servoantrieben nicht über einen Lüfter auf der Motorwelle erfolgt. Die zulässigen Verluste, welche aus der Belastung (Drehmoment) des Antriebes entstehen, müssen somit reduziert werden. Dadurch nimmt das Nennmoment mit zunehmender Drehzahl ab.
Es gibt auch Ansteuergeräte, welche Synchronmotoren ohne Sensoren betreiben (zum Beispiel durch die Erfassung der 3. Oberwelle). Für einen hochwertigen Servoantrieb (Beherrschen von tiefen Drehzahlen, geringe Momentpulsationen ...) ist aber eine Rückführung von Informationen über die Bewegung notwendig.
Synchronmotoren mit Permanentmagneten sind für Drehmomente bis etwa 30 Nm interessant. In Katalogen sind sehr selten Angaben über den Wirkungsgrad zu finden. Obwohl im Rotor eigentlich keine Verluste entstehen sollten, werden die Motoren durch Wärmeverluste im Eisen und den Magneten sehr heiss, vor allem bei höheren Nenndrehzahlen.